上个章节中我们学习了阻塞IO,阻塞IO是通过等待队列来实现的,那么如何让驱动实现非阻塞呢?带着疑问,让我们开始本章节非阻塞IO的学习吧!
27.1 非阻塞IO简介
应用程序可以使用如下所示示例代码来实现阻塞访问:
int fd;
int data = 0;
fd = open("/dev/xxx_dev", O_RDWR); /* 阻塞方式打开 */
ret = read(fd, &data, sizeof(data)); /* 读取数据 */
可以看出对于设备驱动文件的默认读取方式就是阻塞式的,所以之前实验例程测试 APP 都是采用阻塞 IO。
如果应用程序要采用非阻塞的方式来访问驱动设备文件,可以使用如下所示代码:
int fd;
int data = 0;
fd = open("/dev/xxx_dev", O_RDWR | O_NONBLOCK); /* 非阻塞方式打开 */
ret = read(fd, &data, sizeof(data)); /* 读取数据 */
使用 open 函数打开“/dev/xxx_dev”设备文件的时候添加了参数“O_NONBLOCK”,表示以非阻塞方式打开设备,这样从设备中读取数据的时候是非阻塞方式了。
27.2 实验程序编写
27.2.1 编写测试 APP
非阻塞IO实验需要应用程序和驱动配合,所以需要编写驱动代码和应用测试代码。
本实验对应的应用程序网盘路径为:iTOP-RK3568开发板【底板V1.7版本】\03_【iTOP-RK3568开发板】指南教程\02_Linux驱动配套资料\04_Linux驱动例程\21\app。
首先来编写应用测试代码read.c,在此代码中使用非阻塞的方式打开设备,编写好的代码如下所示:
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdlib.h>
int main(int argc, char *argv[])
{
int fd; //定义int类型的文件描述符
char buf1[32] = {0}; //定义读取缓冲区buf
char buf2[32] = {0}; //定义读取缓冲区buf
fd = open("/dev/test",O_RDWR| O_NONBLOCK); //打开/dev/test设备
if (fd < 0)
{
perror("open error \n");
return fd;
}
printf("read before \n");
while (1)
{
read(fd,buf1,sizeof(buf1)); //从/dev/test文件读取数据
printf("buf is %s \n",buf1); //打印读取的数据
sleep(1);
}
printf("read after\n");
close(fd); //关闭文件
return 0;
}
接着编写应用程序write.c,用来向设备文件写入数据,编写好的应用程序如下所示:
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdlib.h>
#include <string.h>
int main(int argc, char *argv[])
{
int fd;
char buf1[32] = {0};
char buf2[32] = "nihao";
fd = open("/dev/test", O_RDWR|O_NONBLOCK); //打开/dev/test设备
if (fd < 0)
{
perror("open error \n");
return fd;
}
printf("write before \n");
write(fd,buf2,sizeof(buf2)); //向/dev/test文件写入数据
printf("write after\n");
close(fd); //关闭文件
return 0;
}
27.2.1 驱动程序编写
本实验对应的网盘路径为:iTOP-RK3568开发板【底板V1.7版本】\03_【iTOP-RK3568开发板】指南教程\02_Linux驱动配套资料\04_Linux驱动例程\21\module。
编写好的驱动程序wq.c如下所示:
#include <linux/init.h>
#include <linux/module.h>
#include <linux/kdev_t.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <linux/uaccess.h>
#include <linux/io.h>
#include <linux/wait.h>
struct device_test{
dev_t dev_num; //设备号
int major ; //主设备号
int minor ; //次设备号
struct cdev cdev_test; // cdev
struct class *class; //类
struct device *device; //设备
char kbuf[32];
int flag; //标志位
};
struct device_test dev1;
DECLARE_WAIT_QUEUE_HEAD(read_wq); //定义并初始化等待队列头
/*打开设备函数*/
static int cdev_test_open(struct inode *inode, struct file *file)
{
file->private_data=&dev1;//设置私有数据
return 0;
}
/*向设备写入数据函数*/
static ssize_t cdev_test_write(struct file *file, const char __user *buf, size_t size, loff_t *off)
{
struct device_test *test_dev=(struct device_test *)file->private_data;
if (copy_from_user(test_dev->kbuf, buf, size) != 0) // copy_from_user:用户空间向内核空间传数据
{
printk("copy_from_user error\r\n");
return -1;
}
test_dev->flag=1; //将条件置1,并使用wake_up_interruptible唤醒等待队列中的休眠进程
wake_up_interruptible(&read_wq);
return 0;
}
/**从设备读取数据*/
static ssize_t cdev_test_read(struct file *file, char __user *buf, size_t size, loff_t *off)
{
struct device_test *test_dev=(struct device_test *)file->private_data;
if(file->f_flags & O_NONBLOCK ){
if (test_dev->flag !=1)
return -EAGAIN;
}
wait_event_interruptible(read_wq,test_dev->flag); //可中断的阻塞等待,使进程进入休眠态
if (copy_to_user(buf, test_dev->kbuf, strlen( test_dev->kbuf)) != 0) // copy_to_user:内核空间向用户空间传数据
{
printk("copy_to_user error\r\n");
return -1;
}
return 0;
}
static int cdev_test_release(struct inode *inode, struct file *file)
{
return 0;
}
/*设备操作函数*/
struct file_operations cdev_test_fops = {
.owner = THIS_MODULE, //将owner字段指向本模块,可以避免在模块的操作正在被使用时卸载该模块
.open = cdev_test_open, //将open字段指向chrdev_open(...)函数
.read = cdev_test_read, //将open字段指向chrdev_read(...)函数
.write = cdev_test_write, //将open字段指向chrdev_write(...)函数
.release = cdev_test_release, //将open字段指向chrdev_release(...)函数
};
static int __init chr_fops_init(void) //驱动入口函数
{
/*注册字符设备驱动*/
int ret;
/*1 创建设备号*/
ret = alloc_chrdev_region(&dev1.dev_num, 0, 1, "alloc_name"); //动态分配设备号
if (ret < 0)
{
goto err_chrdev;
}
printk("alloc_chrdev_region is ok\n");
dev1.major = MAJOR(dev1.dev_num); //获取主设备号
dev1.minor = MINOR(dev1.dev_num); //获取次设备号
printk("major is %d \r\n", dev1.major); //打印主设备号
printk("minor is %d \r\n", dev1.minor); //打印次设备号
/*2 初始化cdev*/
dev1.cdev_test.owner = THIS_MODULE;
cdev_init(&dev1.cdev_test, &cdev_test_fops);
/*3 添加一个cdev,完成字符设备注册到内核*/
ret = cdev_add(&dev1.cdev_test, dev1.dev_num, 1);
if(ret<0)
{
goto err_chr_add;
}
/*4 创建类*/
dev1. class = class_create(THIS_MODULE, "test");
if(IS_ERR(dev1.class))
{
ret=PTR_ERR(dev1.class);
goto err_class_create;
}
/*5 创建设备*/
dev1.device = device_create(dev1.class, NULL, dev1.dev_num, NULL, "test");
if(IS_ERR(dev1.device))
{
ret=PTR_ERR(dev1.device);
goto err_device_create;
}
return 0;
err_device_create:
class_destroy(dev1.class); //删除类
err_class_create:
cdev_del(&dev1.cdev_test); //删除cdev
err_chr_add:
unregister_chrdev_region(dev1.dev_num, 1); //注销设备号
err_chrdev:
return ret;
}
static void __exit chr_fops_exit(void) //驱动出口函数
{
/*注销字符设备*/
unregister_chrdev_region(dev1.dev_num, 1); //注销设备号
cdev_del(&dev1.cdev_test); //删除cdev
device_destroy(dev1.class, dev1.dev_num); //删除设备
class_destroy(dev1.class); //删除类
}
module_init(chr_fops_init);
module_exit(chr_fops_exit);
MODULE_LICENSE("GPL v2");
MODULE_AUTHOR("topeet");
27.3 运行测试
27.3.1 编译驱动程序
在上一小节中的wq.c代码同一目录下创建 Makefile 文件,Makefile 文件内容如下所示:
export ARCH=arm64#设置平台架构
export CROSS_COMPILE=aarch64-linux-gnu-#交叉编译器前缀
obj-m += wq.o #此处要和你的驱动源文件同名
KDIR :=/home/topeet/Linux/linux_sdk/kernel #这里是你的内核目录
PWD ?= $(shell pwd)
all:
make -C $(KDIR) M=$(PWD) modules #make操作
clean:
make -C $(KDIR) M=$(PWD) clean #make clean操作
对于Makefile的内容注释已在上图添加,保存退出之后,来到存放wq.c和Makefile文件目录下,如下图(图 27-1)所示:

图 27-1
然后使用命令“make”进行驱动的编译,编译完成如下图(图27-2)所示:
图 27-2
编译完生成 wq.ko目标文件,如下图(图 27-3)所示:

图 27-3
至此驱动模块就编译成功了,下面交叉编译应用程序。
27.3.2 编译应用程序
来到存放应用程序read.c和write.c的文件夹下,使用以下命令对read.c和write.c进行交叉编译,编译完成如下图(图 27-4)所示:
aarch64-linux-gnu-gcc -o read read.c -static
aarch64-linux-gnu-gcc -o write write.c -static

图 27-4
生成的read write文件就是之后放在开发板上运行的可执行文件,至此应用程序的编译就完成了。
27.3.3 测试
开发板启动之后,使用以下命令进行驱动模块的加载,如下图(图 27-5)所示:
insmod wq.ko
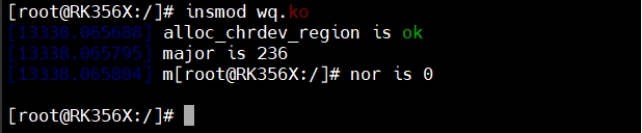
图 27-5
输入以下命令运行read可执行文件,如下图(图 27-6)所示,应用程序进程非阻塞,读取不到数据便返回,然后一直轮询查看是否有数据。
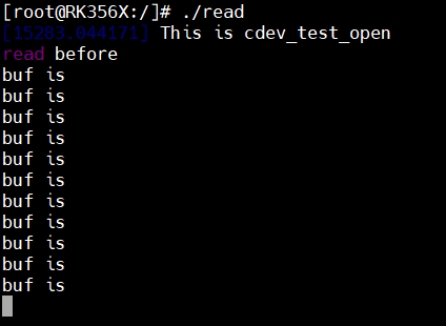
图 27-6
然后输入以下命令运行write可执行文件向设备文件写入数据,如下图(图 27-7)所示:

图 27-7
在使用可执行程序write向缓冲区写入数据时,read可执行程序读取到了缓冲区的数据并打印。
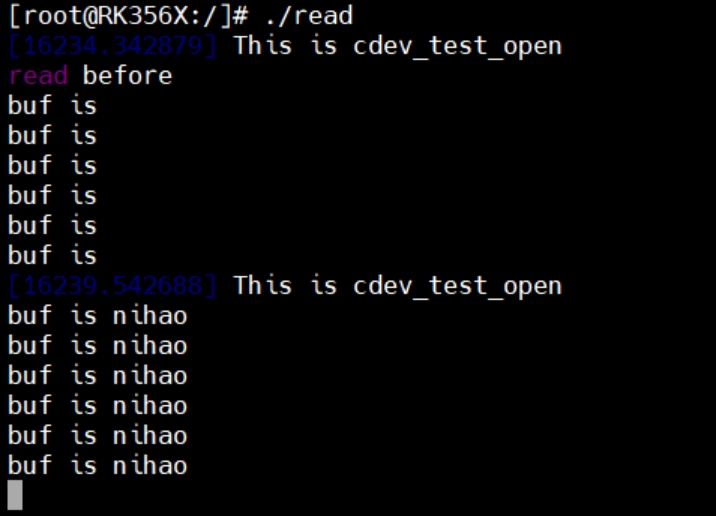
图 27-8
【最新驱动资料(文档+例程)】
链接 https://pan.baidu.com/s/1M4smUG2vw_hnn0Hye-tkog
提取码:hbh6
【B 站配套视频】
https://b23.tv/XqYa6Hm
【RK3568 购买链接】
https://item.taobao.com/item.htm?spm=a1z10.5-c-s.w4002-2245
mg-I4n4FKjR-1694396532085)]
图 27-7
在使用可执行程序write向缓冲区写入数据时,read可执行程序读取到了缓冲区的数据并打印。
[外链图片转存中…(img-AcxUTRRx-1694396532085)]
图 27-8
【最新驱动资料(文档+例程)】
链接 https://pan.baidu.com/s/1M4smUG2vw_hnn0Hye-tkog
提取码:hbh6
【B 站配套视频】
https://b23.tv/XqYa6Hm
【RK3568 购买链接】
https://item.taobao.com/item.htm?spm=a1z10.5-c-s.w4002-2245
2452613.11.2fec74a6elWNeA&id=669939423234