1.实验目的
编写LED灯的驱动,在应用程序中编写控制LED灯亮灭的代码逻辑实现LED灯功能的控制;
2.LED灯相关寄存器分析
LED1->PE10 LED1亮灭:
RCC寄存器[4]->1 0X50000A28
GPIOE_MODER[21:20]->01 (输出) 0X50006000
GPIOE_ODR[10]->1(输出高电平) 0(输出低电平)0X50006014
LED2->PF10 LED2亮灭:
RCC寄存器[5]->1 0X50000A28
GPIOE_MODER[21:20]->01 (输出) 0X50006000
GPIOE_ODR[10]->1(输出高电平) 0(输出低电平)0X50006014
LED3->PE8 LED3亮灭:
RCC寄存器[4]->1 0X50000A28
GPIOE_MODER[17:16]->01 (输出) 0X50006000
GPIOE_ODR[8]->1(输出高电平) 0(输出低电平)0X50006014
GPIOE_OTYPER默认为00
GPIOE_PUPDR默认为0
GPIOE_OSPEEDR默认为00
3.编写代码
---Makefile---工程管理文件
modname?=demo
arch?=arm
ifeq ($(arch),arm)
KERNELDIR:= /home/ubuntu/FSMP1A/linux-stm32mp-5.10.61-stm32mp-r2-r0/linux-5.10.61 #编译生成ARM架构
else
KERNELDIR:=/lib/modules/$(shell uname -r)/build #编译生成X86架构
endif
PWD:=$(shell pwd) #模块化编译文件路径
all:
make -C $(KERNELDIR) M=$(PWD) modules
clean:
make -C $(KERNELDIR) M=$(PWD) clean
obj-m:=$(modname).o
---head.h---头文件
#ifndef __HEAD_H__
#define __HEAD_H__
//LED1和LED3寄存器地址
#define LED1_3_MODER (0xc50006000)
#define LED1_3_ODR (0xc50006014)
#define LED_RCC (0xc50000A28)
//LED2寄存器地址
#define LED2_MODER (0xc50007000)
#define LED2_ODR (0xc50007014)
#endif---mychrdev.c---驱动程序
#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/uaccess.h>
#include <linux/io.h>
#include "head.h"
char kbuf[128] = {0};
unsigned int major;
unsigned int *vir_moder;
unsigned int *vir_odr;
unsigned int *vir_rcc;
unsigned int *vir_moder2;
unsigned int *vir_odr2;
//封装操作方法
int mycdev_open(struct inode *inode, struct file *file)
{
printk("%s:%s:%d\n",__FILE__,__func__,__LINE__);
return 0;
}
ssize_t mycdev_read(struct file *file, char *ubuf, size_t size, loff_t *lof)
{
int ret;
ret = copy_to_user(ubuf,kbuf,size);
if(ret)
{
printk("copy_to_user err\n");
return -EIO;
}
return 0;
}
ssize_t mycdev_write(struct file *file, const char *ubuf, size_t size, loff_t *lof)
{
int ret;
ret = copy_from_user(kbuf,ubuf,size);
if(ret)
{
printk("copy_from_user err\n");
return -EIO;
}
//LED1
if(kbuf[0] == '1')
{
//开灯
(*vir_odr) |= (0x1 << 10);
}
else if(kbuf[0] == '0')
{
//关灯逻辑
(*vir_odr) &= (~(0x1 << 10));
}
//LED2
if(kbuf[1] == '1')
{
//开灯
(*vir_odr2) |= (0x1 << 10);
}
else if(kbuf[1] == '0')
{
//关灯逻辑
(*vir_odr2) &= (~(0x1 << 10));
}
//LED3
if(kbuf[2] == '1')
{
//开灯
(*vir_odr) |= (0x1 << 8);
}
else if(kbuf[2] == '0')
{
//关灯逻辑
(*vir_odr) &= (~(0x1 << 8));
}
return 0;
}
int mycdev_close(struct inode *inode, struct file *file)
{
printk("%s:%s:%d\n",__FILE__,__func__,__LINE__);
return 0;
}
struct file_operations fops={
.open=mycdev_open,
.read=mycdev_read,
.write=mycdev_write,
.release=mycdev_close,
};
//入口函数
static int __init mycdev_init(void)
{
major = register_chrdev(0,"mychrdev",&fops);
if(major < 0)
{
printk("字符设备驱动注册失败\n");
return major;
}
printk("字符设备驱动注册成功:major=%d\n",major);
//相关寄存器的内存映射
vir_odr=ioremap(LED1_3_ODR,4);
if(vir_odr == NULL)
{
printk("物理内存映射失败%d\n",__LINE__);
return -EFAULT;
}
vir_rcc=ioremap(LED_RCC,4);
if(vir_rcc == NULL)
{
printk("物理内存映射失败%d\n",__LINE__);
return -EFAULT;
}
vir_moder=ioremap(LED1_3_MODER,4);
if(vir_moder == NULL)
{
printk("物理内存映射失败%d\n",__LINE__);
return -EFAULT;
}
vir_moder2=ioremap(LED2_MODER,4);
if(vir_moder2 == NULL)
{
printk("物理内存映射失败%d\n",__LINE__);
return -EFAULT;
}
vir_odr2=ioremap(LED2_ODR,4);
if(vir_odr2 == NULL)
{
printk("物理内存映射失败%d\n",__LINE__);
return -EFAULT;
}
printk("寄存器内存映射成功\n");
//硬件寄存器的初始化
(*vir_rcc) |= (0x3 << 4);
//LED1
(*vir_moder) &= (~(0x3 << 20));
(*vir_moder) |= (0x1 << 20);
(*vir_odr) &= (~(0x1 << 10));
//LED2
(*vir_moder2) &= (~(0x3 << 20));
(*vir_moder2) |= (0x1 << 20);
(*vir_odr2) &= (~(0x1 << 10));
//LED3
(*vir_moder) &= (~(0x3 << 16));
(*vir_moder) |= (0x1 << 16);
(*vir_odr) &= (~(0x1 << 8));
return 0;
}
//出口函数
static void __exit mycdev_exit(void)
{
//取消物理内存的映射
iounmap(vir_moder);
iounmap(vir_odr);
iounmap(vir_rcc);
iounmap(vir_moder2);
iounmap(vir_odr2);
//字符设备驱动注销
unregister_chrdev(major,"mychrdev");
}
//声明
//入口函数地址
module_init(mycdev_init);
//出口函数地址
module_exit(mycdev_exit);
//遵循的GPL协议
MODULE_LICENSE("GPL");
---test.c---应用程序测试程序
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdlib.h>
#include <string.h>
int main(int argc,char const *argv[])
{
char buf[128]={0};
int fd = open("/dev/mychrdev",O_RDWR);
if(fd < 0)
{
printf("设备文件打开失败\n");
exit(-1);
}
while(1)
{
printf("请输入对LED1的控制命令1(开灯)0(关灯)>>> ");
fgets(buf,sizeof(buf),stdin);
buf[strlen(buf)-1] = '\0';
write(fd,buf,sizeof(buf));
printf("请输入对LED2的控制命令1(开灯)0(关灯)>>> ");
fgets(buf+1,sizeof(buf),stdin);
buf[strlen(buf)-1] = '\0';
write(fd,buf,sizeof(buf));
printf("请输入对LED3的控制命令1(开灯)0(关灯)>>> ");
fgets(buf+2,sizeof(buf),stdin);
buf[strlen(buf)-1] = '\0';
write(fd,buf,sizeof(buf));
memset(buf,0,sizeof(buf));
}
close(fd);
return 0;
}
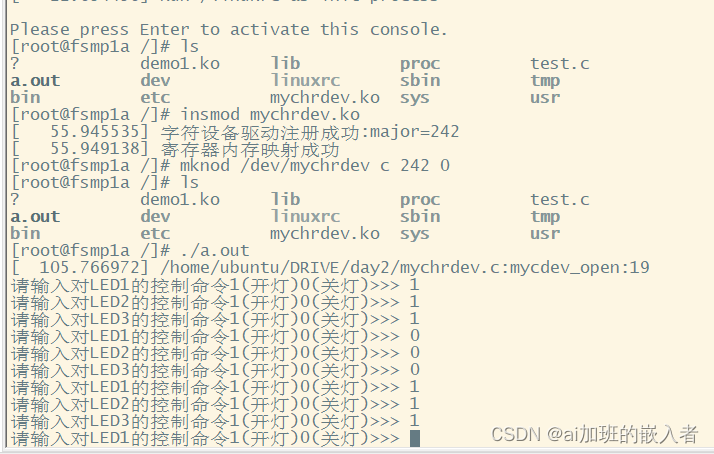
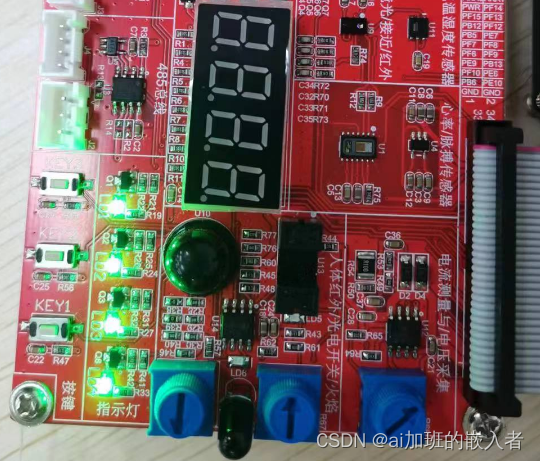
4.测试